

![]()
Özet
İlk olarak II.Dünya Savaşı sürecinde geliştirilen güdümlü mermi teknolojisi, ABD’de yürütülen faaliyetlerle hızla gelişmiştir. Genel anlamıyla güdüm, hareketli bir hedefin akıllı bir mühimmat tarafından tanınması ve hedef hareketinin takip edilmesini sağlayan sistem veya sistemler bütünüdür.
Giriş
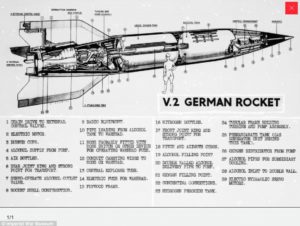
Tarihte ilk güdümlü mermi olarak adlandırılabilecek silah 2. Dünya Savaşı sırasında Almanlar tarafından geliştirilen V1 Roketidir. Roketin güdüm sistemi bir cayro pusula, bir sürat ölçer ve bir altimetreden oluşmaktaydı. 2. Dünya Savaşının sonlarına doğru ise V2 adı verilen ilk balistik güdümlü mermi, müttefiklerin bombardımanlarına karşı intikam amaçlı üretilmişti. 15 metre uzunluğunda ve 12 ton ağırlığındaki roket, sıvı yakıt kullanıyordu. Saatte 3500 knot sürat, 500 mil menzil ve 80 kilometre irtifaya erişebilen V2, yörüngede kalabilmek için arka bölümde yer alan 4 adet kanatçıktan faydalanıyordu. İlk defa Londra, Liege ve Antwerp şehirleri üzerine gönderilmiştir. 1944’ün sonlarına doğru başlayan V2 saldırılarında yaklaşık 10 000 sivil hayatını kaybetmiştir.[1]
V2’nin mucidi Alman Wernher von Braun, savaşın sonlarında Roket Takımı olarak adlandırdıkları bilim adamları ve teknisyen ekibi ile savaş sırasında geliştirilen tüm çalışmaların Amerika Birleşik Devletleri’ne (ABD) transfer edilmesini sağlamış ve burada “Redstone Takımını” oluşturarak ABD ordusu hizmetine girmiştir. Sonraki çalışmalarıyla Jupiter Kıtalararası Füzesinin geliştirilmesini sağlamıştır. Amerikan Uzay ve Havacılık Ajansında (National Aviation and Space Agency (NASA)) çalışmalarına devam eden Von Braun, yörüngeye oturtulan ilk uyduyu fırlatan ekip içinde de yer almıştır.[2]
ABD’de çoğunlukla Alman Fizikçilerin üzerinde yürüyen bu çalışmaların yanı sıra 1950’lerde başlayan NASA’nın Atlas isimli Kıtalararası Balistik Füze çalışmaları da mevcuttur. Atlas çalışmasında ataletsel güdüm sisteminin geliştirilme çalışmaları da başlamıştır. Bu projede kullanılan güdüm sistemine Delta Güdüm Sistemi denmiştir. Otonom bir kontrol bilgisayarının yanında, yerden referans mevki bilgisi alan ve komuta güdüm ile kontrol edilebilen bir güdüm sistemidir. Delta Güdüm Sistemindeki eksiklikler Q Sistemi ile giderilmiştir. Q Sisteminde merminin eksenel hareketleri Q Matrisi adı verilen bir matriste modellenerek doğruluğu daha yüksek bir yörünge hesabı yapılmıştır.
Güdüm
Hareketli bir hedefin ya da uzayda herhangi bir noktanın akıllı bir mühimmat tarafından tanınması ve hedef hareketinin takip edilmesini sağlayan sistem veya sistemler bütünüdür. Alt bileşenlerinde genellikle bir hedef takip sistemi ile birlikte seyir ve kontrol sistemi bulunmaktadır. Hedefin yer değiştirmesine cevap verebilmek veya hedefe doğru tayin edilmiş rota üzerinde ilerleyebilmek için konum bilgisi en az hata ile hesap edilmeli, anlık olarak doğru rota ve sürat değerleri sisteme girdi olarak sunulmalıdır[3].
Güdümlü merminin hedefe başarılı bir şekilde intikal edebilmesi için bazı parçalara ihtiyaç duyulmaktadır. Bunlar bir pusula ya da daha modern hali ile bir cayro pusula, yerden yüksekliği algılayan altimetre, konum bilgisini doğrulayan GPS veya sürat ölçer olabilir. Genel olarak bir güdümlü mermi, kendi konumu ve hedef konumunu algıladıktan sonra dâhili veya bazen harici sensörlere bağlı olarak hedefe ulaştıran rotayı hesaplar, kontrol sistemi vasıtasıyla mermi üzerindeki kanatlar ve tahrik sistemine gerekli komutları ileterek hedefe intikal eder[4].
Güdümlü mermide kullanılan güdüm sistemleri düşmanın savunma imkân kabiliyetine, hedef tipine veya merminin kullanıldığı ortama bağlı olarak değişiklik gösterebilmektedir. Örneğin havada seyreden bir güdümlü mermi ile denizde seyreden torpidonun güdüm ve çalışma sistemi farklılık gösterecektir. Süratli bir hedef olan uçak ile deniz ortamında harekât icra eden gemiye karşı kullanılacak mermideki güdüm sistemleri de farklılık arz etmektedir. Bunun yanında merminin ateşleme sonrasında hedefe yakınlığı ve bulunduğu konum itibari ile farklı güdüm sistemlerini kullanması da söz konusudur.
Güdümlü merminin ateşlenmesini müteakip hedefe varmasına kadar geçen intikal süreci bazı safhalara ayrılmaktadır. Merminin tipine bağlı olarak safha adedi iki veya üç olabilir. Genel olarak hareketli hedeflere karşı kullanılan güdüm sistemlerinde safha adedi üç, sabit hedeflere karşı kullanılan güdüm tiplerinde ise safha adedi ikidir. Ancak hareketli hedefler ile sabit hedefler için ilk iki safhadaki güdümleme türü aynıdır. İlk safha ateşleme safhası, ikinci safha ise orta güdüm veya kullanılan güdüm tipinin kendisi ile isimlendirilmektedir. Üçüncü safha ise terminal safhasıdır. Bu safhada güdümlü mermiler farklı bir sensörü aktif hale getirerek hedefe intikal ederler[5].
Kaynaklar
[1] http://history.nasa.gov/sputnik/braun.html (erişim tarihi: 10 Mart 2016)
[2] “Biography of Wernher Von Braun”, erişim 31 Mayıs 2017, https://history.msfc.nasa.gov/vonbraun/bio.html.
[3] Grewal, Mohinder S.; Weill, Lawrence R.; Andrews, Angus P. (2007). Global Positioning Systems, Inertial Navigation, and Integration (2nd ed.). Hoboken, New Jersey, USA: John Wiley & Sons, Inc. p. 21.
[4] Farrell, Jay A. (2008). Aided Navigation: GPS with High Rate Sensors. USA: The McGraw-Hill Companies. p. 5
[5] Draper, C. S. et al, Apollo Guidance and Navigation Report, Massachusetts Institute of Technology, Instrumentation Laboratory, p. 1-3
Faydalı bir makale. Bunun devamı niteliğinde başka bir yazı da yakında yayınlanacak.